Visualize path planning
Path Planning


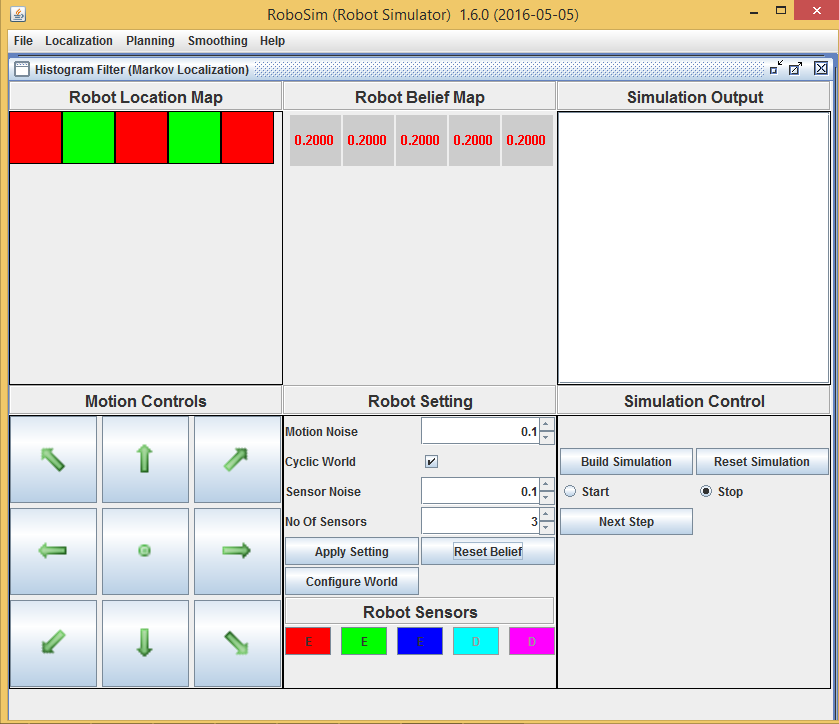
Visualize and Simulate the Robotics concepts such as Localization, Path Planning, P.I.D Controller
Visualize path planning

Particle Filter (Wiki) Monte Carlo localization (MCL), also known as particle filter localization, is an algorithm for robots to localize using a particle filter. Given a map of the environment, the algorithm estimates the position and orientation of a robot as it moves and senses the environment. Problem Description: A robotic car wants to find …
Continue reading "Particle Filter (Monte Carlo localization)"

Visualize and understand the AI and Robotics concepts.
